6DOF tracking at extremely simple and cheap !
The computational load is light ! It can be used in places where light cannot be used !
How about using it as a VR controller ?
Alternatively, it can be used, for example, to measure spatial displacement or alignment of piping during plant construction.
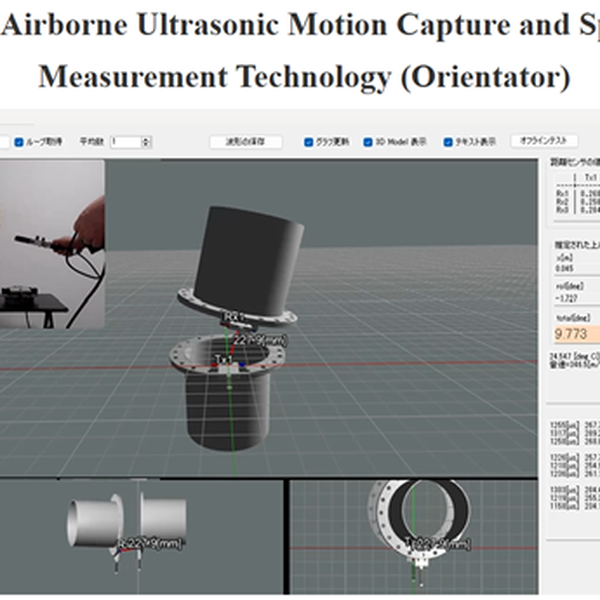
We achieved spatial measurement by using 3 ultrasonic transducers and 3 ultrasonic microphones. The measurement principle is based on 3 sets of 3-side measurements. We acquire plane equations of microphones and transducers, and calculate the orientation angle and direction based on the surface normal vector.
Current specifications are as follows:
Table 1 Examination result and performance of apparatus
Performance Item | Value | | Spatial dimension measurement range | About 1000 mm | | Motion capture operating range | About 700 mm | | Spatial dimensional accuracy | About ±1 mm | | Measurement angle accuracy | About ±1 ° | | Frame per Second (FPS) | About 13 FPS |
| Mismeasurement rate (MAX.) | 5 FPS* |
* Depends on the device's speed, position, direction, and orientation.
< Future Challenges and Prospects>
--Extending the measurable distance range for spatial dimension measurement
In Table 1, the measurable range is approximately 1000mm, but over 2000mm is desired for plant sites. To extend the range while maintaining accuracy, it is necessary to improve the S/N ratio by increasing transmitter output, enhancing receiver sensitivity, and optimizing cross-correlation methods for the transmitted and received waveforms. Optimization of the number of integrations for reception data is also required.
--Improving performance for motion capture
As shown in Table 1, motion capture performance features a range of 700mm at 13 FPS, with errors in convergence calculations at a maximum of 5 FPS. To enhance work safety by monitoring during pipe movement, increasing the frame rate and decreasing convergence errors are necessary. This includes investigating transmission waveforms that are easier to identify [9] and improving the numerical calculation routines for Newton's method to ensure more reliable convergence.
--Supplying the device at a lower cost Compared to optical motion capture, this ultrasonic device has fewer parts and lower computational loads for 3D drawing and iterative calculations. To supply it more cheaply, we plan to replace general-purpose FPGA boards with dedicated circuits, minimize part counts, and implement MEMS technology for transmitters, as receivers already use MEMS microphones.
<Conclusion>
We demonstrated that spatial dimension measurement and motion capture can be configured with ultrasonic waves, allowing positional relationship measurement by constructing piping objects within a PC. In the future, we aim to improve measurable range and frame rate performance based on hardware S/N ratio improvements. We also intend to expand applications by combining with sensors like gyros and gravity sensors, and explore fields where only sound waves can measure, such as inside opaque liquids or dark environments. We expect this to be a highly compatible device for the CPS era.
The thesis "Development of Airborne Ultrasonic Motion Capture and Spatial Dimension Measurement Technology (Orientator)" (in my own web site) is shown below.
https://www.optimized75.com/documents/thesis_of_orientator_(english)_8.html